
Теоретические основы построения эффективных АСУ ТП
2. Автоматические регуляторы и их настройка
2.2. Выбор канала регулирования
Одним и тем же выходным параметром объекта можно управлять по разным входным каналам. Например, температурой в печи - путем изменения расхода воздуха или газа в печь (рис. 2.3).
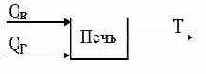
Рис. 2.3. Управление температурой печи по разным каналам.
Задача состоит в том, какой из входных параметров (каналов) следует выбирать. При выборе нужного канала управления исходят из следующих соображений:
1). Из всех возможных регулирующих воздействий выбирают такой поток вещества или энергии, подаваемый в объект или отводимый из него, минимальное изменение которого вызывает максимальное изменение регулируемой величины, т. е. коэффициент усиления по выбранному каналу должен быть по возможности максимальным. Тогда, по данному каналу, можно обеспечить более точное регулирование.
2). Диапазон допустимого изменения управляющего сигнала должен быть достаточен для полной компенсации максимально возможных возмущений, возникающих в данном технологическом процессе, т. е. должен быть запас по мощности управления в данном канале.
3). Выбранный канал должен иметь благоприятные динамические свойства, т. е. запаздывание



4). Выбранный канал регулирования должен быть согласован с технологическим регламентом ведения процесса.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.1. Общие сведения о промышленных системах регулирования
Производственные процессы характеризуются множеством регулируемых величин: температурой, давлением, расходом, концентрацией и т. д., которые называются параметрами процесса. Чтобы технологическое оборудование работало в требуемом режиме, то есть с высоким КПД, с заданной производительностью, давало продукцию необходимого качества и работало надежно, необходимо поддерживать величины, характеризующие процесс, в большинстве случаев постоянными. Эта важнейшая задача возложена на промышленные системы автоматического регулирования и стабилизации технологических процессов.
Промышленные системы регулирования занимают второй уровень современных иерархических систем управления технологическими процессами. Их главная задача состоит в том, чтобы стабилизировать технологические параметры на заданном уровне. Этим занимаются системы автоматической стабилизации. В этих системах сигнал задания (уставка регулятора) остается постоянным в течении длительного времени работы. Другой, не менее важной задачей, является задача программного управления технологическим агрегатом, что обеспечивает переход на новые режимы работы. Решение этой проблемы осуществляется с помощью той же системы автоматической стабилизации, задание которой изменяется от программного задатчика.
В современных технологических комплексах имеются сотни и тысячи контуров регулирования, от качества работы которых во многом зависит качество выдаваемой продукции. Поэтому для большинства промышленных САР необходима достаточно высокая точность их работы

Структурная схема одноконтурной САР промышленным объектом управления приведена на рис. 2.1. Основными элементами ее являются: АР - автоматический регулятор, УМ - усилитель мощности, ИМ - исполнительный механизм, РО - регулируемый орган, СОУ - собственно объект управления, Д - датчик, НП - нормирующий преобразователь, ЗД - задатчик, ЭС - элемент сравнения.
Рис. 2.1. Структурная схема САР промышленным объектом управления.
Обозначение переменных:





Характерной особенностью схемы является наличие нормирующего преобразователя НП, обеспечивающего работу автоматического регулятора со стандартными значениями тока (0ё5 mA) или напряжения (0ё10 В).
Нормирующий преобразователь выполняет следующие функции:
1) преобразует нестандартный входной сигнал (mB) в стандартный выходной сигнал;
2) осуществляет фильтрацию входного сигнала;
3) осуществляет линеаризацию статической характеристики датчика с целью получения линейного диапазона;
4) применительно к термопаре, осуществляет температурную компенсацию холодного спая термопары.
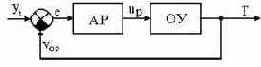
Рис. 2.2. Расчетная схема САР промышленным объектом управления.
Для расчетных целей исходную схему упрощают до схемы, показанной на рис. 2.2, где АР - регулятор, ОУ - объект управления.
Здесь под объектом управления уже понимается неизменяемая часть системы, состоящая из преобразователей сигналов, исполнительного механизма, регулирующего органа, собственно объекта управления и датчика.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
1. Промышленные объекты управления
1.1. Классификация промышленных объектов управления
По характеру протекания технологических процессов объекты управления делятся на циклические, непрерывно-циклические и непрерывные. Локальные системы наиболее широко применяются для управления объектами второго и третьего типов.
По характеру установившегося значения выходной величины объекта при действии на его вход ступенчатого сигнала выделяют объекты с самовыравниванием и без самовыравнивания.
По количеству входных и выходных величин и их взаимосвязи объекты делятся не одномерные (один вход и один выход) и многомерные. Последние могут быть многосвязными - когда наблюдается взаимное влияние каналов регулирования друг на друга, либо несвязные - взаимосвязь между каналами которых мала.
Статические характеристики объекта управления устанавливают связь между установившимися значениями входа и выхода объекта. По виду статических характеристик объекты делятся на линейные и нелинейные. В последних статическая характеристика может быть гладкой, линеаризуемой в окрестности заданной точки, либо носить существенно нелинейный характер. При наличии в объекте нескольких нелинейностей, графическим методом определяется его суммарная нелинейная характеристика. Большинство систем регулирования относиться к классу систем автоматической стабилизации режима работы объекта относительно его рабочей точки (относительно номинального режима работы). В этом случае в процессе работы отклонения переменных, относительно рабочей точки будут малы, что позволяет использовать линейные модели объекта управления. Однако, при смене рабочей точки происходит изменение коэффициента усиления объекта, что будет негативно влиять на динамику замкнутой системы.
Для системы автоматической стабилизации не обязательно определение полной статической характеристики объекта. Достаточно знать лишь динамический коэффициент усиления в окрестности рабочей точки. В тоже время на некоторых объектах управления необходимо знание всей статической характеристики процесса. Если она носит нелинейный характер, то с целью стабилизации общего коэффициента усиления системы, в замкнутый контур включают дополнительную нелинейность, обратную статической характеристике объекта. На практике такой подход реализуется путем использования регулирующих клапанов с различными видами расходной характеристики.
Реальные объекты занимают в пространстве какой-либо объем, поэтому регулируемая величина зависит не только от времени, но и от текущих координат точки измерения. Поэтому полное описание объекта управления будет состоять из системы дифференциальных уравнений с частными производными. При использовании точечного метода измерения одним датчиком, система дифференциальных уравнений с частными производными переходит в систему уравнений с обычными производными. Это существенно упрощает построение математической модели объекта, позволяя определить его передаточную функцию. Однако при наличии множества датчиков, распределенных например по длине объекта, может возникнуть необходимость использования множества управляющих сигналов (распределенное управление).
Объекты могут быть как стационарные и так и нестационарные. В нестационарных объектах параметры изменяются с течением времени (дрейфуют). Примерами таких объектов могут быть химический реактор с катализатором, активность которого падает с течением времени, или аэрокосмический аппарат, масса которого по мере выгорания топлива уменьшается. Такие явления должны учитываться при проектирование соответствующих систем управления.
В зависимости от интенсивности случайных возмущений действующих на объект, они делятся на стохастические и детерминированные. В реальных условиях часто точно неизвестны ни точка приложения возмущения F, ни его характер (Рис. 1.1).
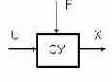
Рис. 1.1. Внешние возмущения в объектах управления.
Известно, что лишь при наличии достаточно точной математической модели объекта можно спроектировать высококачественную систему управления этим объектом. Причем, согласно принципу Эшби, сложность управляющего устройства должна быть не ниже сложности объекта управления.
Поэтому основной целью построения математической модели объекта управления является определение структуры объекта, его статических и динамических характеристик. Особенно важно определение структуры для многомерных и многосвязных объектов управления. В тоже время для локальных объектов управления определение структуры может быть сведено к определению порядка дифференциального уравнения описывающего объект. Кроме того, оцениваются входные сигналы и возмущения действующие на объект (их статистические характеристики, точки приложения, максимальные амплитуды). Значение этих характеристик позволяет выбрать структуру регулятора и рассчитать параметры его настройки, ориентируясь также на критерий качества работы этой системы.
Наряду с динамической частью W(p) в структуре объекта могут содержаться различные запаздывания в сигналах управления, измерения и состояния (рецикла) (Рис. 1.2).
Рис. 1.2. Объект управления с запаздыванием.
В промышленных объектах под рециклом понимается возврат части продукта с выхода объекта на его вход с целью повторной переработки. Большинство промышленных объектов управления имеют запаздывания. Наличие запаздывания объясняется конечной скоростью распространения потоков информации в технологических объектах (транспортное запаздывание). Наряду с этим при понижении порядка модели объекта вводят дополнительное динамическое запаздывание. Для этого выделяют одну наибольшую постоянную времени, а все остальные малые постоянные времени заменяют звеном динамического запаздывания.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
 |
| Библиотека инженера |
| Теоретические основы построения эффективных АСУ ТП | |
| 2. Автоматические регуляторы и их настройка
2.3. Требования к промышленным системам регулирования 1). Промышленная САР должна обеспечивать устойчивое управление процессом во всем диапазоне нагрузок на технологический агрегат. 2). Система должна обеспечивать в окрестности рабочей точки заданное качество процессов управления (время переходного процесса, перерегулирование и колебательность). 3). Система должна обеспечивать в установившемся режиме заданную точность регулирования. Желательно обеспечить нулевую статическую ошибку регулирования. Кроме этого желательно обеспечить заданную дисперсию ошибки регулирования. Все эти условия будут выполнятся, если объект управления является стационарным, либо его вариации параметров достаточно малы и компенсируются запасами устойчивости системы. Этому способствует то, что большинство промышленных систем - это системы автоматической стабилизации заданных параметров. Серийные регуляторы обеспечивают устойчивый процесс регулирования подавляющего большинства промышленных объектов при условии, что правильно выбраны настройки регулятора. Чем выше требования к качеству регулирования, тем более сложной и дорогой будет система. Поэтому при создании САР стремятся найти разумный компромисс между качеством регулирования и затратами на автоматизацию технологического процесса. Назад | Содержание | Дальше | |
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.4. Возмущения в технологическом процессе
Главное назначение систем автоматической стабилизации - борьба с возмущениями. На систему стабилизации в основном действуют два вида возмущений:
- возмущения со стороны нагрузки на технологический объект;
- возмущения в виде изменения сигнала задания на регулятор.
В первом случае система должна скомпенсировать (парировать) внешнее возмущение. Во втором - точно отработать сигнал задания.
Наиболее неприятным случаем является возмущение по нагрузке, т. к. при этом:
1) обычно неизвестно место приложения возмущения;
2) неизвестен момент подачи возмущения;
3) неизвестен характер или вид возмущающей функции.
Основные возмущения - это возмущения со стороны нагрузки на технологический агрегат, которые проявляются в виде неконтролируемых произвольных изменений расходов, концентраций, температур и т. д.
По характеру изменения во времени, возмущения делятся на медленно меняющиеся, импульсные и случайные. В зависимости от характера доминирующих возмущений и типа системы выбирается и нужный критерий оптимизации настроек регулятора.
Выделяют два типа случайных возмущений:
1) низкочастотные;
2) высокочастотные (шумы).
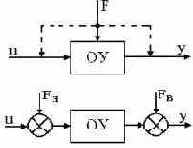
Рис. 2.4. Распределение случайных возмущений.
Низкочастотные случайные возмущения условно считают, что они поступают на вход объекта, в то время, как шумы - на его выход (рис. 2.4). В случае высокочастотных случайных возмущений становится актуальной задача фильтрации этих шумов.
На практике возмущения по нагрузке чаще всего компенсируются соответствующим перемещением регулирующего органа, изменяющего расход вещества или энергии в объект управления.
Поэтому такое возмущение и приводят ко входу объекта, а его величину измеряют в процентах хода регулирующего органа.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.5. Основные показатели качества регулирования
К автоматическим системам регулирования предъявляются требования не только устойчивости процессов регулирования во всем диапазоне нагрузок на объект. Для работоспособности системы не менее необходимо, чтобы процесс автоматического регулирования осуществлялся при обеспечении определенных качественных показателей. Такими показателями являются:
1).Ошибка регулирования (статистическая или среднеквадрати-
ческая составляющие).
2). Время регулирования.
3). Перерегулирование.
4). Показатель колебательности.
5). Динамический коэффициент регулирования


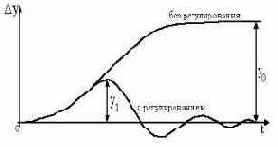
Рис. 2.5. К понятию динамического коэффициента регулирования.
где смысл величин


ясен из рис. 2.5.
Величина

характеризует степень воздействия регулятора на процесс, т.е. степень понижения динамического отклонения в системе с регулятором и без него.
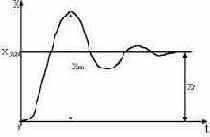
Рис. 2.6. График отработки ступенчатого сигнала задания.
Величина перерегулирования зависит от вида отрабатываемого сигнала.
При отработке ступенчатого воздействия по сигналу задания величина перерегулирования определяется по формуле

где значения величин


показаны на рис.2.6.
При отработке возмущающего воздействия, величина перерегулирования определяется из соотношения

где значения величин


показаны на рис. 2.7.
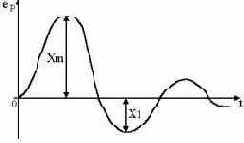
Рис. 2.7. График переходного процесса при отработке возмущения.
Время регулирования - это время, за которое регулируемая величина в переходном процессе начинает отличаться от установившегося значения менее, чем на заранее заданное значение



В некоторых САР наблюдается ошибка, которая не исчезает даже по истечении длительного интервала времени - это статическая ошибка регулирования

У регуляторов с интегральной составляющей ошибки в установившемся состоянии теоретически равны нулю, но практически незначительные ошибки могут существовать из-за наличия зон нечувствительности в элементах системы.
Показатель колебательности M характеризует величину максимума модуля частотной передаточной функции замкнутой системы (на частоте резонанса) и, тем самым, характеризует колебательные свойства системы. Показатель колебательности наглядно иллюстрируется на графике рис. 2.8.
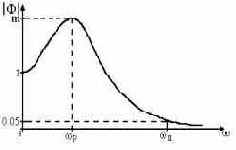
Рис.2.8. График модуля частотной передаточной функции замкнутой системы.
Условно считается, что значение

является оптимальным для промышленных САР, т. к. в этом случае

В некоторых случаях нормируется полоса пропускания системы

Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.6. Типовые процессы регулирования
При настройке регуляторов можно получить достаточно большое число переходных процессов, удовлетворяющих заданным требованиям. Таким образом, появляется некоторая неопределенность в выборе конкретных значений параметров настройки регулятора. С целью ликвидации этой неопределенности и облегчения расчета настроек вводится понятие оптимальных типовых процессов регулирования.
Выделяют три типовых процесса :
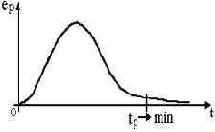
Рис. 2.9. График апериодического переходного процесса.
1. Апериодический процесс с минимальным временем регулирования (рис. 2.9). Этот типовой процесс предполагает, что отрабатывается возмущение F (система автоматической стабилизации). В данном случае настройки подбираются так, чтобы время регулирования

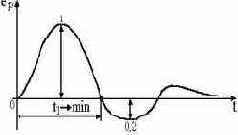
Рис. 2.10. График процесса с 20%-ным перерегулированием.
2. Процесс с 20%-ным перерегулированием и минимальным временем первого полупериода (рис. 2.10). Такой процесс наиболее широко применяется для настройки большинства промышленных САР, т.к. он соединяет в себе достаточно высокое быстродействие


3. Процесс, обеспечивающий минимум интегрального критерия качества (рис.2.11). Интегральный критерий качества выражается формулой

где e - ошибка регулирования.
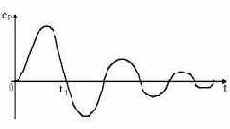
Рис.2.11. График процесса по минимуму интегрального критерия качества.
К достоинствам этого процесса можно отнести высокое быстродействие (1-й полуволны) при довольно значительной колебательности. Кроме этого, оптимизация этого критерия по параметрам настройки регулятора может быть выполнена аналитически, численно (на ЭВМ) или путем моделирования (на АВМ).
Процесс, обеспечивающий минимум интегрального критерия качества, широко применяется при настройке систем регулирования величины pH - характеризующий кислотность раствора.
Для каждого из трех видов оптимальных процессов разработаны соответствующие формулы и номограммы для настройки регуляторов на данный процесс.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.7. Коэффициенты передачи элементов и блоков САР
Основными элементами САР являются: регулятор, исполнительный механизм, объект управления, датчик с преобразователем.
Динамика такой системы во многом определяется произведением статических коэффициентов усиления этих элементов

При расчете динамики используются как размерные, так и безразмерные коэффициенты передач.
Размерные коэффициенты передач в предположении линейности статической характеристики определяются следующим образом

где


Если шкала элемента линейна, то

где

- максимальные и минимальные значения входного и выходного сигналов элемента.
Более удобны в применении безразмерные коэффициенты передачи элементов. При их определении берутся относительные величины приращений

Например, для нагревательной печи при





Использование номинальной величины при определении коэффициента передачи рекомендуется в случае нелинейных статических характеристик элементов систем автоматической стабилизации технологических параметров.
В системах стабилизации расхода выбор нужной расходной характеристики клапана осуществляется в зависимости от вида нелинейности объекта управления с целью линеаризации его статической характеристики.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.8. Типовая структурная схема регулятора
Автоматический регулятор (рис. 2.12) состоит из: ЗУ - задающего устройства, СУ - сравнивающего устройства, УПУ- усилительно-преобразующего устройства, БН - блока настроек.
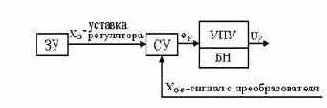
Рис. 2.12. Типовая структурная схема автоматического регулятора.
Задающее устройство должно вырабатывать высоко стабильный сигнал задания (уставку регулятора), либо изменять его по определенной программе. Сравнивающее устройство позволяет сопоставлять сигнал задания с сигналом обратной связи и, тем самым, сформировать величину ошибки регулирования

Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.9. Классификация регуляторов
Автоматические регуляторы классифицируются по назначению, принципу действия, конструктивным особенностям, виду используемой энергии, характеру изменения регулирующего воздействия и т.п.
По принципу действия они подразделяются на регуляторы прямого и непрямого действия. Регуляторы прямого действия не используют внешнюю энергию для процессов управления, а используют энергию самого объекта управления (регулируемой среды). Примером таких регуляторов являются регуляторы давления. В автоматических регуляторах непрямого действия для его работы требуется внешний источник энергии.
По роду действия регуляторы делятся на непрерывные и дискретные. Дискретные регуляторы, в свою очередь, подразделяются на релейные, цифровые и импульсные.
По виду используемой энергии они подразделяются на электрические (электронные), пневматические, гидравлические, механические и комбинированные. Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особенностями автоматической системы.
По закону регулирования они делятся на двух- и трехпозиционные регуляторы, типовые регуляторы (интегральные, пропорциональны, пропорционально-дифференциальные, пропорционально-интегральные, и пропорционально-интегрально-дифференциальные регуляторы - сокращенно И, П, ПД, ПИ и ПИД - регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы. Двухпозиционные регуляторы нашли широкое распространение, благодаря своей простоте и малой стоимости.
По назначению регуляторы подразделяются на специализированные (например, регуляторы уровня, давления, температуры и т.д.) и универсальные с нормированными входными и выходными сигналами и пригодные для управления различными параметрами.
По виду выполняемых функций регуляторы подразделяются на регуляторы автоматической стабилизации, программные, корректирующие, регуляторы соотношения параметров и другие.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.10. Выбор типа регулятора
Задача проектировщика состоит в выборе такого типа регулятора, который при минимальной стоимости и максимальной надежности обеспечивал бы заданное качество регулирования.
Разработчиком могут быть выбраны релейные, непрерывные или дискретные (цифровые) типы регуляторов.
Для того, чтобы выбрать тип регулятора и определить его настройки необходимо знать:
1. Статические и динамические характеристики объекта управления.
2. Требования к качеству процесса регулирования.
3. Показатели качества регулирования для серийных регуляторов.
4. Характер возмущений, действующих на процесс регулирования.
Выбор типа регулятора обычно начинается с простейших двухпозиционных регуляторов и может заканчиваться самонастраивающимися микропроцессорными регуляторами. Заметим, что по требованиям технологического регламента многие объекты не допускают применения релейного управляющего воздействия.
Рассмотрим показатели качества серийных регуляторов. В качестве серийных предполагаются непрерывные регуляторы, реализующие И, П, ПИ и ПИД - законы управления.
Теоретически, с усложнением закона регулирования качество работы системы улучшается. Известно, что на динамику регулирования наибольшее влияние оказывает величина отношения запаздывания к постоянной времени объекта


Минимально возможное время регулирования для различных типов регуляторов при оптимальной их настройке определяется таблицей 2.1.
Таблица 2.1.
| Закон регулирования | П | ПИ | ПИД |
 |
6.5 | 12 | 7 |
где -

время регулирования,

Теоретически, в системе с запаздыванием, минимальное время регулирования

Руководствуясь таблицей можно утверждать, что наибольшее быстродействие обеспечивает П-закон управления. Однако, если коэффициент усиления П-регулятора



Наиболее распространенным на практике является ПИ-регулятор, который обладает следующими достоинствами:
1. Обеспечивает нулевую статическую ошибку регулирования.
2. Достаточно прост в настройке, т.к. настраиваются только два параметра, а именно коэффициент усиления



3. Малая чувствительность к шумам в канале измерения (в отличии от ПИД-регулятора).
Для наиболее ответственных контуров можно рекомендовать использование ПИД-регулятора, обеспечивающего наиболее высокое быстродействие в системе. Обнако следует учитывать, что это условие выполняется только при его оптимальных настройках (настраиваются три параметра). С увеличением запаздывания в системе резко возрастают отрицательные фазовые сдвиги, что снижает эффект действия дифференциальной составляющей регулятора. Поэтому качество работы ПИД-регулятора для систем с большим запаздыванием становится сравнимо с качеством работы ПИ-регулятора. Кроме этого, наличие шумов в канале измерения в системе с ПИД-регулятором приводит к значительным случайным колебаниям управляющего сигнала регулятора, что увеличивает дисперсию ошибки регулирования и износ исполнительного механизма. Таким образом, ПИД-регулятор следует выбирать для систем регулирования, с относительно малым уровнем шумов и величиной запаздывания в объекте управления. Примерами таких систем является системы регулирования температуры.
При выборе типа регулятора рекомендуется ориентироваться на величину отношения запаздывания к постоянной времени в объекте





Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
1. Промышленные объекты управления
1.2. Методы получения математического описания
Существуют аналитические, экспериментальные и комбинированные методы получения математического описания объектов управления.
Аналитические методы базируются на использовании уравнений описывающих физико-химические и энергетические процессы, протекающие в исследуемом объекте управления. Это, например, законы сохранения вещества и энергии (уравнения материального баланса). В настоящее время для многих классов объектов управления получены их математические модели. В частности для аэрокосмических объектов (ракет, самолетов, вертолетов), для технологических объектов (химические реакторы), для энергетических процессов (ядерные реакторы, паровые турбины, генераторы, двигатели). При получении таких описаний обычно оперируют с дифференциальными уравнениями в частных производных, т.к. переменные изменяются как во времени, так и в пространстве.
Экспериментальные методы предполагают проведение серии экспериментов на реальном объекте управления. Обработав результаты экспериментов, оценивают параметры динамической модели объекта, задавшись предварительно ее структурой.
Наиболее эффективными оказываются комбинированные методы построения математической модели объекта, когда, используя аналитически полученную структуру объекта, ее параметры определяют в ходе натурных экспериментов.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.11. Формульный метод определения настроек регулятора
Метод используется для быстрой, приближенной оценки значений параметров настройки регулятора для трех видов оптимальных типовых процессов регулирования.
Метод применим как для статических объектов с самовыравниванием (таблица 2.2), так и для объектов без самовыравнивания (таблица 2.3).
Таблица 2.2.
| Регулятор | Типовой процесс регулирования | ||
| апериодический | с 20% перерегулированием |  |
|
| И |  |
 |
 |
| П |  |
 |
 |
| ПИ |  |
 |
 |
| ПИД |  |
 |
 |
где T,


В этих формулах предполагается, что настраивается регулятор с зависимыми настройками, передаточная функция которого имеет вид:

где -



Таблица 2.3.
| Регулятор | Типовой процесс регулирования | ||
| апериодический | с 20% перерегулированием |  |
|
| П |  |
 |
- |
| ПИ |  |
 |
 |
| ПИД |  |
 |
 |
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.12. Оптимальная настройка регуляторов по номограммам
В отличии от формульного метода, метод расчета по номограммам позволяет более точно определить настройки регулятора, т.к. учитывает наличие нелинейной зависимости между параметрами настройки регулятора и величиной отношения

Существуют номограммы для расчета настроек ПИ и ПИД-регуляторов для объектов первого и второго порядков с запаздыванием.
Предположим, что объект управления описывается звеном первого порядка с запаздыванием, а оптимальный процесс регулирования - это процесс с 20%-ным перерегулированием. Соответствующая номограмма расчета настроек ПИ-регулятора приведена на рис.2.13.
Следует иметь ввиду, что современные электронные и микропроцессорные регуляторы реализуют ПИ- и ПИД-законы регулирования с зависимыми настройками, а пневматические регуляторы - с независимыми настройками вида

Дифференциальная составляющая промышленных регуляторов обычно реализуется в виде

где

- коэффициент усиления по дифференциальной составляющей (выбирается в диапазоне 1 - 10,


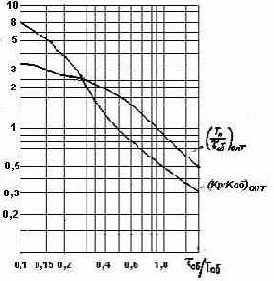
Рис.2.13. Номограмма для расчета настроек ПИ-регулятора.
Чем выше уровень помех в выходном сигнале объекта, тем меньше рекомендуется брать величину

Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.13. Расчет настроек по частотным характеристикам объекта
Существует специальная аппаратура для экспериментального определения амплитудно-фазовой характеристики (АФХ) объекта управления: Эту характеристику можно использовать для расчета настроек ПИ-регулятора, где главным критерием является обеспечение заданных запасов устойчивости в системе.
Запасы устойчивости удобно характеризовать показателем колебательности системы M, величина которого в системе с ПИ- регулятором совпадает с максимумом амплитудно-частотной характеристики замкнутой системы. Для того, чтобы этот максимум не превышал заданной величины, АФХ разомкнутой системы не должна заходить внутрь окружности с центром



Можно доказать, что оптимальными, по минимуму среднеквадратичной ошибки регулирования настройками будут такие, при которых система с показателем колебательности


В связи с этим расчет оптимальных настроек согласно методике профессора Ротача В.Я. состоит из двух этапов:
1. Нахождение в плоскости параметров

и


2. Определением на границе области точки, удовлетворяющей требованию

Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.13. Расчет настроек по частотным характеристикам объекта
2.13.1. Методика расчета настроек ПИ регулятора по АФХ объекта
1. Строится семейство амплитудно-фазовых характеристик разомкнутой системы при



2. Задаются значением показателя колебательности M, из диапазона



выбранное значение показателя колебательности.
3. Строится семейство окружностей, касающихся



4. Для каждой окружности вычисляют предельное значение


5. По значениям


строят границу области заданного показателя колебательности.
6. На этой границе определяют точку, для которой отношение

Построение АФХ разомкнутой системы для различных значений


подробно описано в книге Ротача В.Я.
Профессором Ротачем В.Я. также была разработана упрощенная методика настройки ПИ-регулятора по одной точке АФХ разомкнутой системы. В основу методики положен следующий факт. В результате экспериментов и численных расчетов было установлено, что для различных типов объектов управления при оптимально настроенном ПИ-регуляторе АФХ разомкнутых систем проходят приблизительно через одну точку с амплитудой


и частотой

Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.14. Экспериментальные методы настройки регулятора
Для значительного числа промышленных объектов управления отсутствуют достаточно точные математические модели, описывающие их статические и динамические характеристики. В то же время, проведение экспериментов по снятию этих характеристик весьма дорого и трудоемко.
Экспериментальный метод настройки регуляторов не требуют знания математической модели объекта. Однако предполагается, что система смонтирована и может быть запущена в работу, а также существует возможность изменения настроек регулятора. Таким образом, можно проводить некоторые эксперименты по анализу влияния изменения настроек на динамику системы. В конечном итоге гарантируется получение хороших настроек для данной системы регулирования.
Существуют два метода настройки - метод незатухающих колебаний и метод затухающих колебаний.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.14. Экспериментальные методы настройки регулятора
2.14.1. Метод незатухающих колебаний
В работающей системе выключаются интегральная и дифференциальная составляющие регулятора (


Путем последовательного увеличения

с одновременной подачей небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом



По значениям

и

П-регулятор:

ПИ-регулятор:


ПИД-регулятор:



Расчет настроек регулятора можно производить по критической частоте собственно объекта управления




могут быть определены по амплитуде и периоду критических колебаний собственно объекта управления.
При выведении замкнутой системы на границу колебательной устойчивости амплитуда колебаний может превысить допустимое значение, что в свою очередь приведет к возникновению аварийной ситуации на объекте или к выпуску бракованной продукции. Поэтому не все системы управления промышленными объектами могут выводится на критический режим работы.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.14. Экспериментальные методы настройки регулятора
2.14.2. Метод затухающих колебаний
Применение этого метода позволяет настраивать регуляторы без выведения системы на критические режимы работы. Также, как и в предыдущем методе, для замкнутой системы с П-регулятором, путем последовательного увеличения


Далее определяется период этих колебаний

и значения постоянных интегрирования и дифференцирования регуляторов


Для ПИ-регулятора:

Для ПИД-регулятора:


После установки вычисленных значений

и






Большинство промышленных систем регулирования считаются качественно настроенными, если их декремент затухания D равен 1/4 или 1/5.
В настоящее время российскими учеными под руководством В. Я. Ротача разработан новый метод настройки замкнутых систем управления, основанный на подаче пробных синусоидальных колебаний на вход регулятора. По амплитуде и фазе колебаний выходного сигнала объекта управления осуществляется расчет настроек ПИ-регулятора, исходя из условия обеспечения заданного показателя колебательности M и максимума отношения

Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.15. Регулирование при наличии шумов
Наличие высокочастотных шумовых составляющих в измерительном сигнале приводит к случайным колебаниям исполнительного механизма системы, что, в свою очередь, увеличивает дисперсию ошибки регулирования, снижает точность регулирования. В некоторых случаях сильные шумовые составляющие могут привести систему к неустойчивому режиму работы (стохастическая неустойчивость).
В промышленных системах в измерительных цепях часто присутствуют шумы, связанные с частотой питающей сети (сетевые наводки). В связи с этим важной задачей является правильная фильтрация измерительного сигнала, а также выбор нужного алгоритма и параметров работы регулятора.
Для фильтрации сигналов используются фильтры низкой частоты высокого порядка (5 - 7-й порядки), имеющие большую крутизну спада. Такие ФНЧ иногда встраиваются в нормирующие преобразователи. Кроме этого, для подавления сетевых наводок (50 Гц в России, 60 Гц в США) используют т.н. фильтр-пробку или заграждающий фильтр. Следует учитывать, что заграждающий фильтр рекомендуется применяют только для быстродействующих систем, т.е. систем, полоса пропускания которых более 50 Гц.
Таким образом, главной задачей регулятора является компенсация низкочастотных возмущений. При этом, с целью получения минимальной дисперсии ошибки регулирования, высокочастотные помехи должны быть отфильтрованы.
Однако, в общем случае, эта задача противоречивая, т.к. спектры возмущения и шума могут накладываться друг на друга. Это противоречие разрешается с помощью теории оптимального стохастического управления, которая позволяет добиться хорошего быстродействия в системе при минимально возможной дисперсии ошибки регулирования.
Для уменьшения влияния помех в практических ситуациях применяются два способа, основанных на:
1) уменьшении коэффициента усиления регулятора

2) фильтрации измеряемого сигнала.
Так, например, в пневматической системе "СТАРТ" существует специальный прибор ПФ 3.1 (прибор функциональный), называемый блоком обратного предварения, который, фактически является настраиваемым фильтром низкой частоты. Постоянная времени


Постоянная времени


В общем случае, для многомерных систем, задача оптимальной фильтрации решается с помощью фильтра Калмана. Этот фильтр, наряду с получением оценок вектора состояния объекта, обеспечивает минимальную дисперсию всех его компонентов. Однако, для расчета параметров фильтра, необходимо знание статистических характеристик шумов, что в реальных условиях затруднено. Несмотря на это, в современных бортовых системах управления используются специальные измерители статистических характеристик помех, что позволяет использовать и непрерывно уточнять параметры фильтра Калмана.
В общем случае, с целью снижения уровня помех, необходимо также правильно выбирать места установки датчиков и применять экранирование измерительных линий.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.16. Методы настройки двухсвязных систем регулирования
Из общего числа систем регулирования около 15% составляют двухсвязные системы регулирования (рис. 2.14). В таких системах, даже при наличии устойчивой автономной работы двух регуляторов, вся система может стать неустойчивой, за счет действия перекрестной связи в объекте управления.
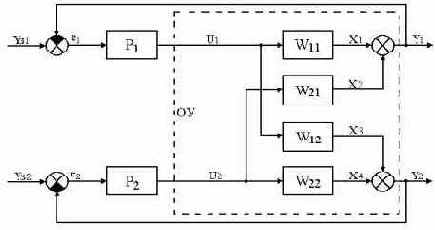
Рис. 2.14. Структурная схема двухсвязной системы.
Объект управления в двухсвязной системе представлен в Р-канонической форме. Удобство такого представления заключается в том, что путем активного эксперимента можно определить все передаточные функции по соответствующим каналам. Промежуточные сигналы


На практике довольно большое число систем являются. Для объективной настройки регуляторов двухсвязных систем формируется критерий качества вида:

где

и



- критерии качества первого и второго контуров.
Путем перераспределения коэффициентов веса


можно выделить более важный контур, качество процессов управления в котором должно быть более высоким. Например, если первый контур должен обеспечивать более высокую точность работы, то

Задача настройки регулятора состоит в том, чтобы при заданных


обеспечить минимальное значение

системы, где


Рассмотрим различные методы настройки регуляторов в двухсвязных системах.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.16. Методы настройки двухсвязных систем регулирования
2.16.1. Метод автономной настройки регуляторов
В этом случае настройка регуляторов Р1 и Р2 производится последовательно, пренебрегая взаимными влияниями контуров. Процедура настройки осуществляется следующим образом:
- регулятор Р2 переводится в ручной режим работы;
- настраивается регулятор Р1 так, чтобы критерий

- отключается настроенный регулятор Р1 и включается регулятор Р2;
- настраивается Р2, обеспечивая минимум

- включаются оба регулятора в работу.
Такой подход рекомендуется использовать если:
- наблюдается малое взаимное влияние контуров;
- быстродействие одного контура значительно выше другого (контуры разнесены по частотам);
- в перекрестных связях одна из передаточных функций имеет коэффициент передачи (усиления) значительно меньше, чем другая, т.е. наблюдается одностороннее влияние.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
1. Промышленные объекты управления
1.2. Методы получения математического описания
1.2.1. Аналитические методы
В качестве примера рассмотрим аналитическую процедуру получения передаточной функции бака с жидкостью (Рис. 1.3).
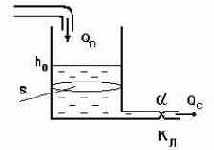
Рис. 1.3. Объект управления - бак с жидкостью.
В баке будет осуществляться стабилизация уровня жидкости на номинальном значении


Слив жидкости идет через нижнюю трубу через установленный на ней клапан


Очевидно, что в установившемся режиме работы приток равен стоку

Таким образом, управляющей величиной является приток жидкости, управляемой - величина уровня, а главным возмущением - изменение величины степени открытия клапана

Пусть приток жидкости в бак увеличился на






Для анализа изменения уровня преобразуем это уравнение к виду

Из физики известно, что величина стока связана с уровнем соотношением

Эта зависимость носит нелинейный характер. Для получения линейного дифференциального уравнения объекта и его передаточной функции необходимо произвести линеаризацию нелинейности в окрестности рабочей точки регулирования. Такой подход справедлив, т.к. при использовании регулятора стабилизации, отклонения текущего значения уровня от заданного будут малыми.
Для линеаризации необходимо разложить функцию (1.2) в ряд Тейлора и отбросить все нелинейные члены. Проделав это, получим

С учетом этой зависимости уравнение (1.1) примет вид

Беря предел, при




Известно, что инерционное звено первого порядка с коэффициентом усиления



Тогда, из сравнения формул (1.3) и (1.4) получим следующие выражения для постоянной времени и коэффициента усиления бака с жидкостью

Достоинства аналитических методов:
- не требуют проведения экспериментов на реальном объекте;
- позволяют определить математическое описание еще на стадии проектирования системы управления;
- позволяют учесть все основные особенности динамики объекта управления, как-то наличие нелинейностей, нестационарность, распределенные параметры и т.д.;
- обеспечивают получение универсального математического описания, пригодного для широкого класса аналогичных объектов управления.
Недостатки:
- трудность получения достаточно точной математической модели, учитывающей все особенности реального объекта;
- проверка адекватности модели и реального процесса требуют проведения натурных экспериментов;
- многие математические модели имеют ряд трудно оцениваемых в численном выражении параметров (например, константы скоростей химических реакций).
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.16. Методы настройки двухсвязных систем регулирования
2.16.2. Метод итеративной настройки регуляторов
Этот метода аналогичен предыдущему методу, но здесь осуществляется многократная настройка регуляторов Р1 и Р2 (последовательная подстройка) с целью обеспечения минимального значения критерия качества

Следует учитывать, что только метод итеративной настройки регуляторов обеспечивает качественную работу двухсвязной системы даже при наличии сильных перекрестных связей. Это объясняется тем, что оптимизация критерия качества

Данный метод часто применяется при аналоговом и цифровом моделировании двухсвязных систем, т.к. в реальных условиях он весьма трудоемок.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
2. Автоматические регуляторы и их настройка
2.16. Методы настройки двухсвязных систем регулирования
2.16.3. Метод аналитического конструирования регуляторов
Этот метод позволяет синтезировать многомерный регулятор, учитывающий в своей структуре взаимосвязь переменных в объекте управления. Синтез ведется с помощью методов теории оптимального или модального управления при описании объекта в пространстве состояний.
Структурная схема оптимального регулятора состояния, содержащего наблюдающее устройство приведена на рис. 2.15. Схема содержит следующие элементы: Н - наблюдатель; ОУ - объект управления; МОУ - модель объекта управления; ОРС - оптимальный регулятор состояния, ЕН - ошибка наблюдения, XМ - вектор состояния модели, XЗ - вектор задания, U - вектор входа ОУ, Y - вектор выхода ОУ, YМ - вектор выхода модели.
Рис. 2.15. Структурная схема оптимального регулятора состояния.



Оптимальный регулятор состояния, являясь наиболее совершенным типом регулятора, требует измерения всех компонент вектора состояния объекта. Для получения их оценок (



где Q и R - матрицы штрафов (весов) на компоненты вектора состояния и вектора управления.
Реализация оптимального регулятора состояния чаще всего производится на управляющей вычислительной машине (УВМ).
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
3. Цифровые регуляторы и их настройка
Цифровые алгоритмы управления являются важнейшей составной частью программного обеспечения микропроцессорных контроллеров и управляющих вычислительных машин (УВМ). УВМ осуществляет опрос сигналов с датчиков, вычисляет значения управляющих сигналов по заданному закону регулирования, а затем выдает их на исполнительные механизмы. Период опроса (квантования) изменяется в зависимости от динамических параметров процесса от долей до нескольких десятков секунд.
В настоящее время наблюдается тенденция вытеснения аналоговых систем управления цифровыми . Объясняется это широкими возможностями по реализации самых совершенных алгоритмов регулирования, что, в свою очередь, гарантирует получение высокой точности и хорошего быстродействия в замкнутой системе непосредственного цифрового управления.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
3. Цифровые регуляторы и их настройка
3.1. Алгоритмы цифрового ПИД регулирования
Наиболее распространенными алгоритмами являются ПИ и ПИД алгоритмы цифрового управления. При правильной настройке эти алгоритмы обеспечивают достаточно хорошее качество управления для большинства объектов промышленной технологии.
Рассмотрим процедуру вывода алгоритма цифрового ПИД- регулятора из соответствующего непрерывного закона, имеющего вид

где

-ошибка регулирования.
Запишем уравнение (3.1) в конечных разностях, путем замены


где


Отметим, что при достаточно малых периодах квантования цифровой ПИД закон управления обеспечивает почти такое же качество процессов управления, что и исходный непрерывный закон (3.1).
На практике вместо вычислений абсолютных значений управляющего сигнала удобней вычислять его приращения


Или, приведя подобные члены, получим

где обозначено

Структурная схема цифрового ПИД регулятора приведена на рис. 3.1., где через

Рис. 3.1. Структурная схема скоростного ПИД-регулятора.
Алгоритм работы всей системы управления при использовании цифровой модели объекта будет иметь вид


При этом параметры цифровой модели объекта управления в координатах "вход - выход" находятся путем взятия модифицированного Z-преобразования от передаточной функции объекта первого порядка с запаздыванием, что приводит к следующим формулам


где

,


Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
3. Цифровые регуляторы и их настройка
3.2. Выбор периода квантования
Для того, чтобы эффект квантования по времени мало сказывался на динамику системы цифрового регулирования, рекомендуется выбирать период квантования из соотношения:

где:

- это время достижения выходным сигналом уровня 95% от установившегося значения при подаче на вход объекта ступенчатого сигнала. Если объект первого порядка, то

Другой подход к выбору величины периода квантования основан на рекомендациях американских ученых Зиглера и Никольса, согласно которым


- период критических колебаний объекта управления.
В реальных условиях при управлении инерционными процессами значение


Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
3. Цифровые регуляторы и их настройка
3.3. Упрощенная методика расчета настроек цифрового ПИД регулятора
С целью упрощения процедуры настройки цифрового ПИД-регулятора рекомендуется (согласно Зиглеру и Никольсу) выбирать следующие значения отношений

при


В этом случае, согласно формулами (3.4), соответствующие коэффициенты будут равны:

Таким образом в алгоритме (3.5) настраиваемым параметром остается лишь один коэффициент усиления регулятора

Для цифрового ПИ закона управления

получим:

После определения периода квантования


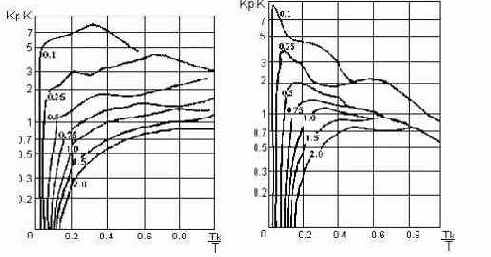
Рис. 3.2 Номограмма для ПИ-регулятора Рис. 3.3. Номограмма для ПИД-регулятора
Однако при известных параметрах объекта управления определение величины КР возможно с помощью номограмм, приведенных на рис. 3.2 и 3.3. Эти номограммы построены с помощью ЭВМ путем минимизации критерия по величине


Пример. Определить настройки цифрового ПИ-регулятора для объекта первого порядка с запаздыванием, с параметрами: К = 2,4; Т =612c; т=480c;

Для определения величины

необходимо определить отношения:

По номограмме рис. 3.2 найдем


Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
3. Цифровые регуляторы и их настройка
3.4. Расчет настроек цифрового регулятора по формулам
Здесь, как и ранее, предполагается, что переходная характеристика объекта управления аппроксимирована звеном первого порядка c запаздыванием. При этом, с целью исключения (уменьшения) бросков управляющего сигнала при ступенчатом изменении сигнала задания, используется несколько другая форма записи дискретного ПИД- закона управления, а именно

Выбрав период квантования

Для ПИ-регулятора:

Для ПИД-регулятора:

В этих формулах учтено запаздывание на величину

Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
4. Оптимальные регуляторы для объектов с запаздыванием
4.1. Технологические объекты с запаздыванием
Характерной особенностью большинства технологических объектов является наличие значительных запаздываний в каналах управления и измерения, что объясняется конечной скоростью распространения сигналов информации в объектах (транспортное запаздывание).
Другой особенностью большинства объектов управления является их многоемкостностью ( наличие каскадов или цепочек технологических объектов). Многоемкостность приводит к повышению порядка дифференциального уравнения объекта т.е. к появлению множества достаточно малых постоянных времени объекта. В этом случае, с целью упрощения динамической модели объекта, вводится дополнительное звено запаздывания, величина которого примерно равна сумме отбрасываемых постоянных времени объекта. Такое запаздывание называется динамическим.
Кроме этого в некоторых объектах, охваченных контуром обратной связи (объекты с рециклом) появляется дополнительное запаздывание в контуре рециркуляции (Рис.1.2).
Наличие запаздывания в технологических объектах резко ухудшает динамику замкнутой системы. Обычно при отношении

В связи с этим повысить качество управления можно либо путем уменьшения запаздывания в объекте, либо за счет применения регулятора более сложной структуры, а именно оптимального регулятора. Из теории оптимального управления следует, что такой регулятор в своей структуре должен содержать модель объекта управления.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
4. Оптимальные регуляторы для объектов с запаздыванием
4.2. Постановка задачи синтеза оптимального регулятора
С целью применения метода пространства состояний и метода оптимального линейного управления перейдем от описания динамики объекта в терминах передаточной функции к описанию в пространстве состояний.
Структурная схема объекта первого порядка с запаздыванием в канале управления приведена на рис 4.1, где w(t) - сигнал внешнего возмущающего воздействия.
Рис. 4.1. Структурная схема объекта управления.
С целью придания астатических свойств замкнутой системе введем в структуру объекта управления интегральную составляющую оптимального регулятора (Рис.4.2).
Рис. 4.2. Модифицированная структурная схема объекта управления с интегральной составляющей.
Будем осуществлять синтез регулятора, который оптимизирует только свободное движение объекта управления (т.е. движение, возникающее из-за ненулевых начальных условий). Поэтому в структурной схеме рис.4.2. возмущающий сигнал w(t) положим равным нулю.
Запишем соответствующие передаточные функции


Или


Переходя от операторных уравнений к дифференциальным получим





где

,

Запишем систему уравнений (4.5) в нормальной форме Коши





где

Таким образом мы получили описание модифицированного объекта управления в пространстве состояний. Запишем систему (4.6) в матричном виде



(4.7)
где




В качестве критерия оптимизации применяют интегральный квадратичный критерий качества, обеспечивающий получение линейного оптимального закона управления

Q и R это известные, выбираемые проектировщиком, матрицы штрафов на координаты векторов состояния и управления. Такая постановка задачи синтеза известна под названием аналитического конструирования регуляторов, основоположником которого является профессор Лётов А.М.
Предполагается, что все компоненты вектора состояния X(t) доступны для измерения. Кроме этого матрица штрафа


Для упрощения структуры критерия качества матица


Матрица штрафа на координаты вектора управления

В нашем случае управление

- скаляр, поэтому R=r , r>0,



При выборе численных значений коэффициентов штрафа в простейшем случае можно задаться

Часто принимают

и варьируют только

и



Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
4. Оптимальные регуляторы для объектов с запаздыванием
4.3. Решение задачи синтеза.
Решение задачи синтеза основано на формировании внутри регулятора упрежденного вектора состояния


Таким образом, оптимальный закон управления должен иметь вид

или в раскрытом виде

Такой подход позволяет вычислить компоненты


Задача определения оптимального управляющего сигнала распадается на две подзадачи:
1). Задача вычисления вектора

для системы без запаздывания.
2). Задача формирования упрежденного сигнала

Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
1. Промышленные объекты управления
1.2. Методы получения математического описания
1.2.2. Методы экспериментального определения динамических характеристик объектов управления
В настоящее время при расчете настроек регуляторов локальных систем широко используются достаточно простые динамические модели промышленных объектов управления. В частности, использование моделей инерционных звеньев первого или второго порядка с запаздыванием для расчета настроек регуляторов обеспечивает в большинстве случает качественную работу реальной системы управления.
В связи с этим возникает задача определения численных значений параметров динамических моделей промышленных объектов управления. Опыт показывает, что значительно проще, но с достаточной точность, определить эти параметры экспериментально на реальном объекте управления. Особенно оправдан такой подход для одномерных объектов управления, работающих совместно с системой автоматической стабилизации.
В зависимости от вида переходной характеристики (кривой разгона) задаются чаще всего одним из трех видов передаточной функции объекта управления:
- в виде передаточной функции инерционного звена первого порядка

где -

коэффициент усиления, постоянная времени и запаздывание, которые должны быть определены в окрестности номинального режима работы объекта.
Для объекта управления без самовыравнивания передаточная функция имеет вид

Более точнее динамику объекта описывает модель второго порядка с запаздыванием

Экспериментальные методы определения динамических характеристик объектов управления делятся на два класса:
1. Методы определение временных характеристик объекта управления.
2. Методы определение частотных характеристик объекта управления.
Временные методы определения динамических характеристик делятся, в свою очередь, на активные и пассивные.
Активные методы предполагает подачу на вход объекта пробных тестирующих сигналов, каковыми являются
- регулярные функции времени (ступенчатый или прямоугольный импульсы, гармонический сигнал, периодический двоичный сигнал);
- пробные сигналы случайного характера (белый шум, псевдослучайный двоичный сигнал - ПСДС).
В зависимости от вида пробного сигнала выбирают соответствующие методы обработки выходного сигнала объекта управления. Так, например, при подаче ступенчатого управляющего сигнала, снимают кривую разгона объекта, а при подаче прямоугольного импульсного сигнала снимают кривую отклика. Кривая отклика снимается для объектов, не допускающих подачу на вход объекта ступенчатых сигналов.
Достоинствами активных методов являются:
- достаточно высокая точность получения математического описания;
- относительно малая длительность эксперимента.
Следует учитывать, что активные методы, в той или иной степени, приводят к нарушению нормального хода технологического процесса. Поэтому проведение эксперимента должно быть тщательно спланировано.
В пассивных методах на вход объекта не подаются никакие пробные сигналы, а лишь фиксируется естественное движение объекта в процессе его нормального функционирования. Полученные реализации массивов данных входных и выходных сигналов обрабатываются статическими методами. По результатам обработки получают параметры передаточной функции объекта. Однако, такие методы имеют ряд недостатков:
- малая точность получаемого математического описания, (т.к. отклонения от нормального режима работы малы);
- необходимость накопления больших массивов данных с целью повышения точности (тысячи точек);
- если эксперимент проводится на объекте, охваченном системой регулирования, то наблюдается эффект корреляции (взаимосвязи) между входным и выходным сигналами объекта через регулятор. Такая взаимосвязь снижает точность математического описания.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
4. Оптимальные регуляторы для объектов с запаздыванием
4.4. Вычисление вектора Кос.
Вычисление вектора


где матрица Р является единственным положительно определенным решением нелинейного матричного уравнения Риккати

Раскрывая уравнение Риккати, получим

Для упрощения записей введем обозначения


.
Произведя перемножения матриц, получим

Это матричное уравнение распадается на систему алгебраических уравнений вида




Из четвертого уравнения вычисляем



Из первого уравнения путем решения квадратного уравнения находим


Из второго уравнения вычисляем


Раскрыв выражения для




Знание матрицы Риккати P позволяет наряду с получением коэффициентов вектора


Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
4. Оптимальные регуляторы для объектов с запаздыванием
4.5. Нахождение выражения для X(t+т).
Известно, что для объекта без запаздывания уравнение описывающее движение компонент его вектора состояния имеет вид:

Первая часть выражения является свободной составляющей, которая зависит от динамических свойств объекта управления (матрицы A) и от вектора начальных условий

Интеграл является вынужденной составляющей, определяемой как динамическими свойствами объекта (матрицы A и B), так и видом управляющего сигнала U(S) .
При учете запаздывания в канале управления в уравнении (4.19) вместо сигнала U(S) должен использоваться запаздывающий сигнал


Из выражения (4.20) получим упрежденный сигнал вектора состояния

Выделим


Вынесем

за скобки

Заменив выражение в квадратных скобках на X(t) получим формулу для упрежденного вектора состояния

Сделав замену переменной в выражении (4.21)

окончательно получим

Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
4. Оптимальные регуляторы для объектов с запаздыванием
4.6. Получение оптимального закона управления.
С учетом полученного выражения (4.23) оптимальный закон управления будет иметь вид

Как видно, закон управления наряду с пропорциональной составляющей содержит и функциональную составляющую. Очевидно, что для формирования оптимального закона управления необходимо знание структуры и параметров объекта управления, т.е. его математической модели. Из этого следует вывод, что оптимальный регулятор в своей структуре должен содержать модель объекта управления, с помощью которой будет реализовываться функциональная составляющая алгоритма.
Для получения оптимального выражения в раскрытом виде найдем матричные экспоненты, входящие выражение (4.24), используя теорему Сильвестра

где

- собственные значения матрицы


Или

Откуда

Опуская промежуточные выкладки из формулы (4.25) найдем

Матричная экспонента



После проделанных преобразования оптимальный закон управления примет вид

Перемножив матрицы, получим

где коэффициенты усиления по пропорциональной




равны




Полученный оптимальный закон управления содержит пропорциональную и интегральную составляющие (т.е ПИ- регулятор) и две функциональныe составляющие, соответствующие апериодическому и интегрирующему звеньям модифицированного объекта управления с запаздыванием.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
4. Оптимальные регуляторы для объектов с запаздыванием
4.7. Реализация оптимального регулятора.
Реализация оптимального закона управления (4.29) затрудняется наличием функциональных составляющих в его структуре. С целью упрощения реализации полученного закона найдем его изображение по Лапласу от всех составляющих

где L[] - символ преобразования по Лапласу.
Для нахождения изображений по Лапласу функциональных составляющих воспользуемся формулой свертки, согласно которой свертыванию оригиналов во временной области соответствует произведение их изображений

Здесь знак

- означает операцию свертывания оригиналов.
В раскрытом виде формула свертки (4.34) записывается в виде

Сравнивая первый интеграл в выражении для оптимального закона управления (4.33) с интегралом в выражении (4.35) получим

и

Однако, в интеграле свертки и интегралах для функциональных составляющих закона (4.29) не совпадают верхние пределы интегрирования, поэтому прямо воспользоваться формулой свертки нельзя.
Очевидно, что интеграл свертки необходимо привести к виду, обеспечивающему равенство

Рис. 4.3.
Это можно достичь, если одну из функций в исходном интеграле искусственно сделать нулевой на интервале времени t>



Функция, существующая на интервале и равная нулю вне этого интервала


Тогда L - изображений от первой функциональной составляющей можно записать в виде


Учитывая, что


, получим:


Аналогично найдем L-изображение для второй функциональной составляющей в выражении для оптимального закона управления

Исходя из полученных результатов, оптимальный закон управления примет вид(4.40)
Знание операторной формы записи оптимального закона позволяет разработать структурную схему оптимального астатического регулятора для объекта первого порядка с запаздыванием (Рис.4.4).
Рис.4.4. Структурная схема оптимальной системы управления.
Связь, обозначенная пунктиром, соответствует точному, теоретическому алгоритму управления (4.40). Однако на практике в объекте управления трудно выделить этот сигнал, поэтому его моделируют в регуляторе с помощью звена с чистым запаздыванием.
Как видно из структурной схемы, оптимальный регулятор для объекта первого порядка с запаздыванием состоит из типового ПИ-регулятора и корректирующего устройства, в структуре которого содержится модель объекта управления.
Данный регулятор особенно эффективен для управления объектами, в которых отношение

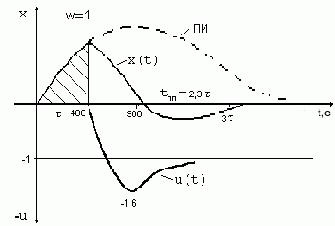
Рис. 4.5. Переходный процесс в системе с оптимальным регулятором.
Параметры объекта управления были равны




;



По аналогичной методике может быть получена структура оптимального регулятора для объекта второго порядка с запаздыванием. В этом случае оптимальный регулятор состоит из типового ПИД-регулятора и корректирующего устройства, в структуре которого содержится два инерционных звена и одно интегрирующее.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
5. Модальные цифровые регуляторы для объектов с запаздыванием
Широкое развитие цифровых управляющих устройств, обладающих большими возможностями требует разработки новых, более эффективных алгоритмов дискретного управления технологическими объектами. Модальные цифровые алгоритмы управления реализуют наиболее совершенную структуру астатического регулятора состояния. Для компенсации запаздывания в эту структуру вводится упредитель выходных сигналов объекта управления. Использование теории модального цифрового управления позволяет существенно упростить расчет параметров астатического регулятора состояния.
Поставим задачу разработки методики расчета астатического модального регулятора с упредителем, обеспечивающую получение таких параметров настройки регулятора, которые дадут выбранное расположение корней характеристического уравнения замкнутой системы.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
5. Модальные цифровые регуляторы для объектов с запаздыванием
5.1. Модальный цифровой регулятор для объекта первого порядка с запаздыванием
Рассмотрим наиболее общий случай, когда выбранный период квантования


Тогда (см. раздел 3) цифровая модель объекта в координатах "вход



где коэффициенты вычисляются согласно формулам (3.6).
В системе пространства состояний это уравнение выглядит так

Для придания астатизма модальному регулятору добавим в уравнение объекта уравнение дискретного интегратора, а дополнительный запаздывающий сигнал управления


Тогда получим

(5.3)
Запишем уравнения (5.3) в матричном виде

(5.4)
где

Уравнение регулятора состояния с упредителем для объекта (5.4) имеет вид

(5.5)
Таким образом необходимо решить две задачи:
1). Вычислить вектор обратных связей

для объекта без запаздывания.
2). Сформировать упрежденный вектор состояния

1). Вычисления вектора.
Для вычисления вектора

запишем уравнение замкнутой системы без
запаздывания


(5.6)
где матица замкнутой системы равна

. (5.7)
Запишем характеристическое уравнение запаздывающей системы:



. (5.8)
Это уравнение распадается на систему трех линейных алгебраических уравнений, получаемых путем сравнения коэффициентов при соответствующих степенях переменной



(5.9)
При выборе величины

следует иметь в виду, что при уменьшении его значения, быстродействие системы возрастает, но возрастает и амплитуда управляющего сигнала.
2). Формирование упрежденного вектора состояния

5. Модальные цифровые регуляторы для объектов с запаздыванием
5.2. Модальный цифровой регулятор для объекта второго порядка с запаздыванием
Для значительного числа объектов управления, в частности для тепловых объектов, более точным является описание динамики с помощью передаточной функции второго порядка с запаздыванием (1.7).
Для синтеза модального алгоритмы управления необходимо получить дискретное описание этого объекта при заданном периоде квантования

Опуская промежуточные выкладки получим

Вычисление коэффициентов проводим по формулам

где

Заметим, что описание в виде (5.12) носит общий и универсальный характер, т.к. оно охватывает и объекты с колебательным переходным процессом и мининимально-фазовые объекты.
Используя рассмотренный ранее подход, модальное управление объектом (5.12) должно осуществляться по закону

где коэффициенты вектора обратных связей вычисляются по следующим формулам





где вспомогательные коэффициенты

вычисляются по формулам







На рис.5.3. приведена упрощенная структурная схема модальной цифровой системы управления объектом второго порядка для случая


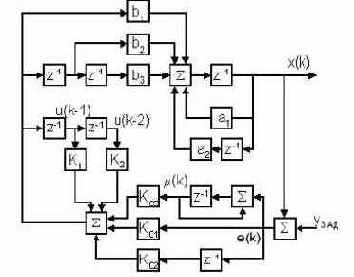
Рис. 5.3. Структурная схема цифровой системы управления объектом второго порядка.
При наличии запаздывания (М>0) в эту схему необходимо ввести цифровой упредитель сигналов


Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
6. Адаптивные регуляторы и системы управления
6.1. Адаптивные регулирующие контроллеры
В конце 70-х годов разработчики систем автоматического управления получили средства микропроцессорной техники с их поистине безграничными возможностями. Тогда казалось, что наконец-то будут реализованы многообещающие идеи теории автоматического управления, в частности идеология оптимального адаптивного управления, позволяющая радикально повысить качество управления при априори неизвестной и к тому же непредвиденно меняющейся математической модели объекта. Последнее обстоятельство особенно радовало потребителей средств управления, поскольку оно, по существу, обещало устранение сложных и трудоемких работ по динамической настройке систем во время пуска, а затем по периодической подстройке в процессе эксплуатации.
И действительно, в первых серийных микропроцессорных системах управления технологическими процессами, примером которых может служить система <Novatune> (на рынке появилась в 1981 г.) шведской фирмы ASEA, были использованы модифицированные оптимальные адаптивные алгоритмы типа с цифровой моделью объекта. Согласно материалам фирмы эта система получила широкое распространение, правда, преимущественно в странах Северной Европы. Однако спустя некоторое время комментарии стали более сдержанными и даже скептическими а затем практически во всех появившихся на международном рынке микропроцессорных системах и индивидуальных контроллерах произошел возврат к традиционным ПИД алгоритмам регулирования. Принципиально новым в этих системах было появление модулей автоматизированной настройки; однако заложенные в этих модулях алгоритмы кардинально отличались от предсказывавшихся теорией адаптации. Создается впечатление, что разработчики новых микропроцессорных систем, разочаровавшись в теории, обратились к чисто прагматическим методам, взятым из опыта работы квалифицированных наладчиков систем автоматического регулирования. К настоящему времени господствующее положение заняли два подобных метода.
1.Экспертные методы автоматизированной настройки (например, EXACT алгоритм американской фирмы Foxboro и сходные алгоритмы контроллеров японских фирм Yokogawa и Hitachi), учитывающие рекомендации опытных экспертов-наладчиков, осуществляющих настройку подачей на действующую систему автоматического регулирования ступенчатых воздействий и анализирующих затем характер получаемой реакции на такие воздействия
2.Автоматизированный вариант полувековой давности эмпирического метода настройки Зиглера - Никольса, основанный на выводе действующей системы с П регулятором на границу устойчивости и расчете по критическим периодам колебаний и коэффициенту передачи регулятора оптимальных параметров настройки ПИД регулятора с использованием для этого простых эмпирических формул. Автоматизация метода состоит в замене настраиваемого регулятора двухпозиционным реле, что приводит к возникновению установившихся автоколебаний в контуре регулирования. На таком принципе работают блоки автонастройки контроллеров типа "Ремиконт" и "Протар".
В обоих методах не удалось реализовать адаптивное управление, которое, по самому определению этого термина, должно обеспечить слежение параметров настройки за непрерывно меняющимися свойствами объекта; успешно реализована лишь автоматизированная настройка параметров регулятора, осуществляемая только при практически неизменных во время настройки свойствах объекта.
Наиболее важной особенностью реализованных методов настройки является то, что последние выполняются с использованием тех или иных активных воздействий на систему: в первом случае - подачей ступенчатых идентифицирующих воздействий, во втором - изменением алгоритма регулирования. Правда, в материалах фирмы Foxboro утверждается, что в качестве ступенчатых идентифицирующих воздействий могут использоваться и ступенчатые изменения возмущений, и задания, возникающие в процессе нормальной эксплуатации системы. Однако анализ заложенных в контроллеры логических алгоритмов распознавания таких ситуаций показывает, что это возможно только при исключительно благоприятных для настройки условиях работы объекта, когда значение амплитуды отклонения регулируемой величины значительно превосходит средний уровень ее случайных изменений в процессе нормальной работы, на которые налагается отклонение, вызванное априори известными ступенчатыми возмущениями. Работоспособность ЕХАСТ- алгоритма в обычно существующих системах с относительно высоким уровнем случайных возмущений можно, по-видимому, объяснить только тем, что, в соответствии с инструкцией фирмы, включение контроллера в работу должна предшествовать настройка по экспериментальной переходной характеристике объектов (кривой разгона), а хаотическое изменение параметров, осуществляем ЕХАСТ- алгоритмом относительно этой настройки, не приводит к возникновению аварийных ситуаций только потому, что это изменение ограничивается заранее устанавливаемыми в контроллере пределами.
Таким образом, мировой опыт подтверждает сформулированную в России (В.Я. Ротач) более четверти века назад концепцию построения САУ на базе типовых ПИД регуляторов с применением алгоритмов автоматизированной настройки, базирующейся на периодически вводимом в систему активном воздействии (сигнальном, алгоритмическом, структурном). При этом было показано, что ПИД алгоритмы в большинстве случаев достаточно близки к оптимальным, а поиск улучшения качества управления следует искать на пути усложнения информационных структур систем управления (переходом к многоконтурным, каскадным схемам и схемам с компенсацией возмущений).
Было также отмечено, что попытки реализовать адаптацию по данным нормального функционирования объекта без активного вмешательства в процесс регулирования из-за ряда причин системного характера обречены на неудачу. Реально существующая проблема состоит не в том, чтобы изобрести систему адаптации, функционирующую без вызванных идентифицирующими воздействиями добавочных отклонений регулируемой величины, а в том, чтобы сделать эти отклонения достаточно малыми, приемлемыми для практики. Соответственно одной из главных проблем в задаче адаптации становится оптимизация самого процесса настройки, т.е. достижение оптимума настройки при минимуме потерь. Этого можно добиться декомпозицией процедуры поиска с использованием в алгоритмах настройки нижнего уровня специально разработанных не экстремальных критериев / 11 /. Эта процедура основана на использовании активных частотных методов идентификации объектов и расчета оптимальной настройки регулятора. Применение частотных методов позволяет обеспечить помехозащищенность алгоритма, а также рационально организовать активный эксперимент на действующей системе в плане минимизации вмешательства в ее работу. Это связано с тем, что системы регулирования технологических процессов при оптимальной настройке обычно имеют частотные характеристики с одним резонансным пиком. При этом для точной настройки системы достаточно определить комплексную частотную характеристику объекта в узком диапазоне - в окрестности частоты резонанса. Так как резонансная частота системы остается неизвестной до окончания расчета ее оптимальной настройки, то разрешение этого противоречия достигается с помощью итерационной процедуры, на каждом шаге которой оценивается по возможности минимальное число точек частотной характеристики системы с использованием для расчета оптимальной настройки достаточно простой аппроксимирующей модели объекта, уточняющейся в процессе настройки системы.
Для реализации этого подхода рекомендуется алгоритм со структурой вида цикл в цикле. Во внутреннем цикле на каждом шаге оценивается вектор комплексной частотной характеристики системы лишь на одной частоте и рассчитывается оптимум настройки по модели объекта с двумя свободными коэффициентами. По окончании внутреннего цикла выполняется внешний цикл итерационной процедуры, в котором оцениваются векторы частотной характеристики на добавочных частотах. Это позволяет уточнить структуру модели объекта и численные значения ее коэффициентов, фиксируемых во внутреннем цикле.
На практике оказывается достаточным выполнить внешний цикл лишь при первоначальной настройке системы, а в дальнейшем можно ограничиться выполнением внутреннего цикла итерационной процедуры с контролем частотной характеристики системы на одной частоте.
Настроенная по этому методу система с ПИД регулятором удовлетворяет с достаточной для практики точностью следующим условиям оптимальности: обеспечивается достаточно интенсивное затухание собственных колебаний системы благодаря ограничению частотного показателя колебательности М; минимизируется линейный интегральный критерий, т. е. площадь под графиком ошибки регулирования при ступенчатом возмущении, а также среднее квадратическое отклонение регулируемой величины при воздействии низкочастотных случайных возмущений. Автоматическая настройка осуществляется без участия оператора.
Рассмотренный алгоритм настройки - лишь один из возможных. Он удобен в том отношении, что он самостоятельно выбирает частоту колебаний, заведомо принадлежащую существенному для каждого конкретного объекта диапазону частот, в пределах которого будет протекать процесс регулирования. Этот алгоритм относительно прост и позволяет оптимизировать параметры настройки регулятора независимо друг от друга. Практически очень важным его свойством является невозможность потери системой устойчивости при любых начальных параметрах настройки регулятора. Недостатки же этого алгоритма состоят в его относительно слабой помехозащищенности, возможности ошибок в оценке параметров при сильных возмущениях, действующих на объект во время выполнения настройки. Наладчик должен уметь правильно выбрать целесообразный в каждой конкретной ситуации алгоритм или оптимальную последовательность применения различных алгоритмов.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
6. Адаптивные регуляторы и системы управления
6.2. Адаптивный ПИД регулятор с частотным разделением каналов управления и самонастройки
Предложен новый принцип построения адаптивных систем управления с частотным разделением каналов управления и самонастройки. В таких системах осуществляется непрерывный процесс подстройки параметров регулятора под изменяющиеся свойства объекта управления при минимальной величине пробного гармонического сигнала.
Согласно предложенному принципу разделение каналов осуществляется путем включения заграждающего (режекторного) фильтра в обратную связь основного контура управления. Заграждающий фильтр разрывает цепь обратной связи на частоте критических колебаний объекта, что позволяет использовать метод Зиглера - Никольса для расчета настроек регулятора.
Структурная схема системы управления с адаптивным ПИД-регулятором приведена на рис.6.1.
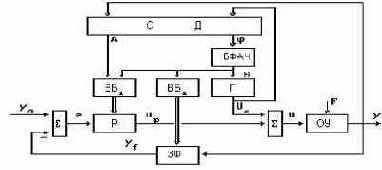
Рис. 6.1. Структурная схема системы управления с адаптивным ПИД- регулятором.
Отслеживание критической частоты объекта, на которой фазовый сдвиг между входом и выходом равен -3,14 рад, осуществляется блоком фазовой автоподстройки частоты (БФАЧ). Блок изменяет частоту генератора синусоидальных колебаний (Г) таким образом, чтобы обеспечить этот фазовый сдвиг между входом и выходом. С помощью блока синхронного детектирования (СД) осуществляется выделение установившихся значений амплитуды и фазы пробных колебаний в выходном сигнале У объекта управления (ОУ). Первый и второй вычислительные блоки (ВБ 1,2) производят расчет настроек ПИД-регулятора и коэффициентов заграждающего фильтра.
Включение заграждающего фильтра последовательно с объектом приводит к сдвигу критической частоты колебаний и изменению коэффициента усиления системы ОУ+ЗФ, что иллюстрируется графиками рис.6.2.
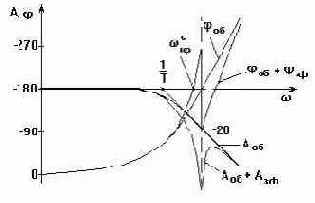
Рис. 6.2. Влияние заграждающего фильтра на ЛАХ и ЛФХ объекта.
Такое негативное влияние динамики заграждающего фильтра на запасы устойчивости в системе должно быть учтено при расчете настроек регулятора, если предполагается непрерывная работа контура адаптации. Экспериментально было установлено, что для объекта первого порядка с запаздыванием формулы Зиглера - Никольса для расчета настроек регулятора в вычислительном блоке ВБ1 должны быть скорректированы следующим образом

где 1.3 - коэффициент коррекции, Акр, Ткр - амплитуда и период критических колебаний собственно объекта управления, автоматически определяемые контуром адаптации. Заметим, что для объекта второго порядка с запаздыванием вместо коэффициента 1.3 в формуле для вычисления величины Кр необходимо взять значение 1.6, так как происходит большее увеличение усиления объекта при смещении влево его критической частоты колебаний. Однако оптимальность полученных настроек не гарантируется для объектов с большим запаздыванием. Это связано с тем, что формулы Зиглера-Никольса носят эмпирический характер и рассчитаны на объекты с отношением t /Т от 0 до 0,3.
Рассмотрим алгоритмы работы основных блоков адаптивной системы управления. Основу системы составляет цифровой ПИД-регулятор. Уравнение динамики регулятора в координатах вход - выход описывается уравнением (3.4). Коэффициенты этого регулятора пересчитываются через параметры настройки непрерывного ПИД-регулятора, которые определяются вычислительным блоком ВБ1 по формулам (6.1).
Частотное разделение каналов управления и самонастройки осуществляется путем включения точно настроенного на частоту пробных колебаний заграждающего фильтра в главный контур системы, что позволяет исключить влияние регулятора на гармоническую составляющую выходного сигнала объекта управления, подаваемых на его вход. Это обеспечивает быстрое отслеживание критической частоты колебаний объекта. Уравнение динамики цифрового заграждающего фильтра второго порядка в координатах вход - выход имеет вид

где





где



Рассмотрим алгоритм работы блока синхронного детектирования. Его задача состоит в определение текущего значения амплитуды и фазы пробных колебаний в выходном сигнале объекта. Это осуществляется через вычисление синусной








где





Текущие значения амплитуды и фазы пробных колебаний определяются по формулам


Учитывая, что почти все промышленные объекты управления вносят отрицательные фазовые сдвиги с увеличением частоты пробных колебаний, производится уточнение текущего значение фазы по условиям:
если


если



Для уменьшения дисперсии оценок амплитуды и фазы в блоке СД используется фильтр скользящего среднего по 2 - 5 текущим значениям величин




Для оценки установившихся значений амплитуды и фазы в блоке СД измеряются также величины их на каждом анализируемом интервале


Если эти величины находятся в определенном поле допуска, то логический блок разрешает работу вычислительных блоков ВБ1 и ВБ2.
Блок фазовой автоподстройки частоты БФАЧ, работая по интегральному закону управления, изменяет нормированный период колебаний



где коэффициент усиления закона регулирования

При этом, под значением

понимается установившееся значение фазового сдвига на

На рис 6.3 показаны графики процессов самонастройки в рассматриваемой адаптивной системе управления, полученные путем моделирования ее динамики на ЭВМ. В качестве модели объекта управления бралась передаточная функция, состоящая из трех последовательно включенных инерционных звеньев с постоянными времени 59 с, 100 с, 257 с и звена запаздывания в 30 с. Коэффициент усиления объекта был равен 1. Период квантования был принят равным 20 с. На рис. 6.3 обозначены: U, Y,-графики входного и выходного сигналов объекта, N, Q, M - графики нормированного периода, фазы и амплитуды пробных колебаний в выходном сигнале Y. Установившиеся значения параметров настройки приведены на графике. В момент времени

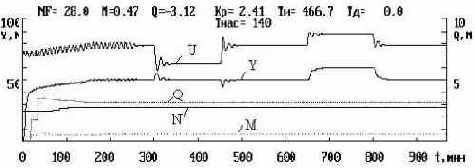
Рис. 6.3. Графики процессов самонастройки.
Для квазистационарных объектов управления можно лишь периодически включать контур самонастройки. Периодичность включения контура будет определяться скоростью дрейфа параметров объекта. Для нестацонарных объектов необходима непрерывная работа контура адаптации и расчёт настроек регулятора по скорректированным формулам Циглера-Никольса.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
6. Адаптивные регуляторы и системы управления
6.3. Адаптивный ПИ регулятор с настройкой по АФХ разомкнутой системы
Показано, что при оптимальных по точности (в смысле минимума средне-квадратичной ошибки регулирования) настройках ПИ-регулятора для различных типов объектов управления годографы АФХ их разомкнутых систем будут проходить через одну общую точку, в которой длина вектора АФХ


На рис. 6.4 изображена структурная схема адаптивной системы управления, с настройкой по одной точке амплитудно-фазовой характеристики разомкнутой системы. На этой схеме приняты те же обозначения блоков и сигналов, что и на рис. 6.1.
Рис. 6.4. Структурная схема адаптивной системы управления.
Вновь введенный вычислительный блок ВБ 2 осуществляет пересчет постоянной интегрирования регулятора при смене нормированного периода колебаний по формуле

где

Логический блок ЛБ определяет момент достижения установившемся значением фазового сдвига величины


где




После расчета оптимального коэффициента усиления регулятора происходит отключение контура самонастройки, заграждающего фильтра и генератора синусоидальных колебаний.
На рис.6.5 показаны графики процессов самонастройки в рассматриваемой адаптивной системе управления, полученные путем моделирования ее динамики на ЭВМ. В качестве модели объекта управления бралась та же передаточная функция, что и ранее. Обозначения на этом рисунке соответствуют рис.6.3. Установившиеся значения параметров настройки приведены на графике. В момент времени

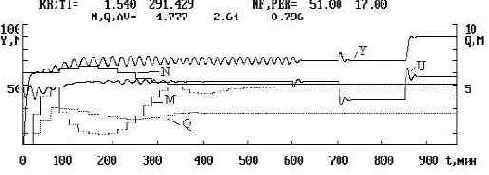
Рис.6.5. Графики процессов самонастройки.
Главным достоинством предложенного алгоритма адаптации по сравнению с предыдущим можно считать возможность оптимальной по минимуму СКО настройки регулятора для различных видов передаточной функции объектов с запаздыванием при наличии шумов в канале измерения.
В то же время, работа системы на более низких частотах пробного сигнала, чем в предыдущем случае затрудняет организацию процедуры непрерывного отслеживания изменяющихся параметров объекта управления.
Назад
| Содержание
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
1. Промышленные объекты управления
1.2. Методы получения математического описания
1.2.3. Определение динамических характеристик объекта управления по его кривой разгона
При определении динамических характеристик объекта по его кривой разгона на вход подается или ступенчатый пробный сигнал или прямоугольный импульс. Во втором случае кривая отклика должна быть достроена до соответствующей кривой разгона.
При снятии кривой разгона необходимо выполнить ряд условий:
1. Если проектируется система стабилизации, то кривая разгона должна сниматься в окрестности рабочей точки процесса.
2. Кривые разгона необходимо снимать как при положительных, так и отрицательных скачках управляющего сигнала. По виду кривых можно судить о степени асимметрии объекта. При небольшой асимметрии расчет настроек регулятора рекомендуется вести по усредненным значениям параметров передаточных функций. Линейная асимметрия наиболее часто проявляется в тепловых объектах управления.
3. При наличии зашумленного выхода желательно снимать несколько кривых разгона с их последующим наложением друг на друга и получением усредненной кривой.
4. При снятии кривой разгона необходимо выбирать наиболее стабильные режимы процесса, например, ночные смены, когда действие внешних случайных возмущений маловероятно.
5. При снятии кривой разгона амплитуда пробного входного сигнала должна быть, с одной стороны, достаточно большой, чтобы четко выделялась кривая разгона на фоне шумов, а, с другой стороны, она должна быть достаточно малой, чтобы не нарушать нормального хода технологического процесса.
Сняв кривую разгона, и оценив характер объекта управления (с самовыравниванием или без) можно определить параметры соответствующей передаточной функции. Передаточную функцию вида (1.5) рекомендуется применять для объектов управления с явно выраженной доминирующей постоянной времени (одноемкостный объект). Перед началом обработки кривую разгона рекомендуется пронормировать (диапазон изменения нормированной кривой 0 - 1) и выделить из ее начального участка величину чистого временного запаздывания.
1. Промышленные объекты управления
1.2. Методы получения математического описания
1.2.4. Метод Орманса
Это метод позволяет по нормированной кривой разгона определить две доминирующие постоянные объекта управления для модели вида (1.7).
Методика поясняется с использованием предыдущей кривой разгона, приведенной на рис.1.4. Для этого:
1) Из нормированной кривой разгона определяется время, соответствующее значению




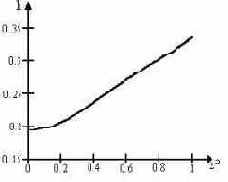
Рис. 1.6. Номограмма для определения величины

Постоянные времени объекта управления


определяются с помощью вспомогательной величины

Постоянные времени объекта управления

и


Если


Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
1. Промышленные объекты управления
1.2. Методы получения математического описания
1.2.5. Частотные методы определения динамических характеристик
Эти методы предполагают, что на вход объекта подается периодический сигнал с известной частотой и амплитудой. При этом, если этот сигнал формируется с помощью прямоугольных импульсов, то эквивалентная амплитуда синусоидального сигнала будет больше амплитуды прямоугольного импульса в

Частотные методы определения динамических характеристик объекта предполагают наличие двух этапов, на которых определяются:
1). Амплитудно-фазовая характеристика объекта.
2). Передаточная функция объекта.
Амплитудно-фазовая характеристика (АФХ) объекта несет большую информацию об объекте, чем его кривая разгона. Таким образом, определение динамики объекта управления по его АФХ позволяет получить более точную динамическую модель, работающую в широком диапазоне частот. Однако при определении динамических характеристик объекта с помощью частотных методов следует учитывать, что они более трудоемки и требуют наличия специальной аппаратуры (низкочастотные генераторы периодических сигналов, регистрирующая аппаратура).
В процессе проведения экспериментов по снятию АФХ желательно предварительно определить так называемый существенный диапазон частот объекта. Для этого необходимо найти критическая частота колебаний wp объекта, т. е. частота, на которой входная и выходная гармоники колеблются в противофазе.
Для экспериментального определения частоты wp рекомендуется использовать метод двухпозиционного регулирования неполным притоком. Рабочий диапазон частот эксперимента (6 - 7 точек) рекомендуется выбирать из соотношения

По виду полученной в результате построения АФХ выбирается нужный вид передаточной функции объекта управления.
На втором этапе необходимо определить такие параметры модели объекта, чтобы АФХ модели как можно точнее соответствовала АФХ реального объекта.
При наличии нелинейной статической характеристики объекта управления при подаче на его вход пробных колебаний, выходной сигнал объекта можно отличить от синусоидального. В этом случае для выделения истинного значения амплитуды первой гармоники рекомендуется использовать метод двенадцати ординат.
Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
1. Промышленные объекты управления
1.2. Методы получения математического описания
1.2.6. Определение параметров объекта управления методом наименьших квадратов
Этот метод предполагает, что используются массивы значений входных и выходных сигналов объекта, снятых через некоторый интервал времени

Рассмотрим методику применение метода наименьших квадратов на примере цифровой модели первого порядка, заданной в виде:

Структурная схема эксперимента с использованием модели объекта показана на рис. 1.7. Здесь ОУ - объект управления, М - модель объекта,

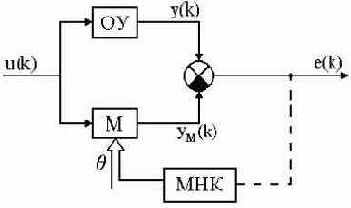
Рис. 1.7. Структурная схема эксперимента.
Пусть накоплено N+1 точек измерения входного и выходного сигналов объекта. В методе наименьших квадратов обобщенная ошибка идентификации должна быть минимальна:

Для упрощения записи опустим в дальнейших выкладках пределы суммирования. Раскроем выражение (1.10) в виде

где

После соответствующих преобразований формулы (1.11), раскрытия скобок и приведения подобных получим

где

При минимизации E необходимо определить частные производные по параметрам





где

Откуда следует формула для вычисления оценок вектора параметров объекта управления по методу наименьших квадратов

Обратная матрица A-1 всегда существует, так как исходная матрица A симметричная и положительно определенная, что следует из формул (1.14).
Зная параметры дискретной модели можно определить параметры передаточной функции объекта

Известно, что связь между параметрами дискретной модели (1.9) и передаточной функции (1.20) определяется формулами

Откуда следует, что

При использовании МНК, получаемые оценки вычисляются с некоторыми ошибками, которые называются смещением оценок. Для получения достаточно представительных результатов необходимо выполнить ряд условий:
1) Подавать на вход объекта управления какой-либо пробный тестирующий сигнал, достаточно богатый в спектральном отношении (например ПСДС). Такой сигнал эквивалентен подаче на объект большого множества различных гармонических составляющих, что позволяет оценить достаточно большую полосу частот АФХ объекта.
2) Объем исследуемой выборки (N) должен быть достаточным для получения представительных оценок, причем, чем меньше уровень пробного ПСДС, больше должно быть число N. Существует рекуррентный метод наименьших квадратов (РМНК), который позволяет в темпе с процессом (в реальном времени) получать текущие оценки параметров объекта и по их сходимости определить величину N и момент окончания эксперимента.
3) С увеличением уровня шумов на выходе объекта точность оценок снижается. Смещение оценок возникает и при охвате исследуемого объекта обратной связью через регулятор, т.к. в этом случае возникает корреляционная связь между входом и выходом объекта, которая и приводит к смещению оценок.
Учет запаздывания в объекте управления приводит к появлению задержки в управляющем сигнале на М периодов квантования

где

В связи с этим, наряду с оценкой параметров


необходимо определить и величину задержки



Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
1. Промышленные объекты управления
1.2. Методы получения математического описания
1.2.7. Понятие о статистических методах определения динамических характеристик объекта
В статистических методах определения динамических характеристик объекта управления предполагается, что входной и выходной сигналы объекта представляют собой реализации случайных процессов. В связи с этим их обработка должна производиться статическими методами. При этом входной сигнал может быть либо искусственно сформирован от генератора шума, либо быть естественным шумовым компонентом в условиях нормальной эксплуатации объекта.
Пробный входной сигнал должен содержать в своем спектре множество гармоник со случайной амплитудой и фазой. Это позволяет ускорить процесс определения параметров объекта управления. При этом необходимо, чтобы входной сигнал был достаточно спектрально насыщен, т. е. имел как низко-, так и высокочастотные составляющие.
Этому требованию удовлетворяет сигнал типа "белого шума". Но в реальных условиях такой сигнал не воспроизводим, поэтому ограничивают частотный спектр случайного сигнала, примером которого является псевдослучайный двоичный сигнал - ПСДС. Генератор шума настраивают таким образом, чтобы он генерировал множество гармоник, оценивающих наиболее существенный участок АФХ объекта управления.
Входной и выходной сигналы объекта квантуют по времени и полученные массивы данных вводят в ЭВМ. Предварительно происходит обработка этих массивов путем их центрирования, когда из текущего массива данных вычитается его среднее значение, и путем отбеливание, в результате которого из выходного сигнала исключаются явные шумовые составляющие не несущие информации.
По полученным массивам входных и выходных данных определяют автокорреляционную






. Спектральная плотность характеризует распределение дисперсии амплитуд гармонических составляющих соответствующих сигналов. Зная спектральные плотности можно определить модуль частотной передаточной функции объекта, используя соотношение

Назад
| Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
Введение
Современные системы управления сложными объектами промышленной технологии строятся по иерархическому принципу. Это значит, что система управления такими объектами расчленяется на ряд систем, стоящие на разных уровнях подчинения. Система более высокого ранга, ориентируясь на общий (глобальный) критерий управления, выдает команды на включение или отключение отдельных локальных объектов, а также осуществляет выбор частных критериев управления этими объектами. Локальные системы управления осуществляют поддержание заданных оптимальных режимов как в пусковых, так и в нормальных эксплуатационных условиях. Являясь нижним иерархическим уровнем автоматических систем управления промышленными объектами локальные системы осуществляют функции измерения, контроля и регулирования основных технологических параметров, характеризующих состояние технологического процесса. Количество регулируемых параметров в отдельно взятой локальной системе управления невелико и составляет один или два параметра. Из общего числа систем управления современным производством локальные системы составляют около 80%. Качество работы локальных систем управления во многом определяет стабильность и качество выходного продукта, а следовательно и рентабельность производства.
Содержание
| Дальше
НА ГЛАВНУЮ СТРАНИЦУ КОМПАНИИ "АТМ" >>
Copyright (c) 2000 ATM
Такое формирование осуществляется путем последовательного (для



Тогда модальный закон управления с упредителем примет вид

(5.10)
Раскрывая выражение (5.10) получим формулы для вычисления упрежденных сигналов

(5.11)
где

По полученным формулам работает блок упреждения, введенный в структуру модальной цифровой системы регулирования, показанной на рис 5.1.
В этой системе введен элемент сравнения, формирующий сигнал ошибки



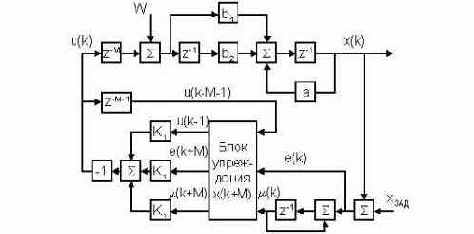
Рис. 5.1. Структура цифровой системы управления с упредителем.
Пример расчета.
Пусть передаточная функция объекта имеет вид

Часто для упрощения расчетов выбирают величину периода квантования, кратную запаздыванию. В этом случае коэффициент





Рис. 5.2. Структурная схема цифровой системы управления.
Таблица.5.1.
| k | e(k) | u(k) | x(k+1) | м(k+1) |
| 0 | -1 | 7.43 | 0 | 0 |
| 1 | -1 | -3.758 | 0 | -1 |
| 2 | 2.173 | -4.168 | 3.173 | -2 |
| 3 | 0 | 0.416 | 1 | 0.173 |
| 4 | 0 | 0.416 | 1 | 0.173 |
| Содержание
| Дальше
Copyright (c) 2000 ATM
Пример. Дана нормированная кривая разгона объекта, у которой заранее выделена величина чистого запаздывания

 |
0 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 18 | 22 |
 |
0 | 0,087 | 0,255 | 0,43 | 0,58 | 0,7 | 0,78 | 0,84 | 0,92 | 0,96 |
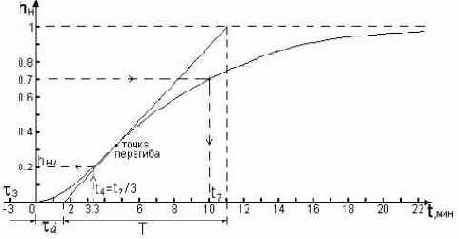
Рис. 1.4. График кривой разгона. Динамический коэффициент усиления

Определение динамических характеристик объектов по кривой разгона можно производить двумя методами.
1) Метод касательной к точке перегиба кривой разгона.
В данном случае точка перегиба соответствует переходу кривой от режима ускорения к режиму замедления темпа нарастания выходного сигнала. Постоянная времени Т и динамическое запаздывание


2) Формульный метод позволяет аналитически вычислить величину динамического запаздывания и постоянной времени по формулам






Методику определения параметров динамической модели (1.6) объекта без самовыравнивания рассмотрим на примере кривой разгона уровня в барабане котла теплоагрегата. Предполагается, что на вход объекта увеличили подачу воды на 10 т/час =DG, при этом уровень начал увеличиваться. Приращение уровня зафиксировано в таблице 1.2. Таблица 1.2.
 |
0 | 100 | 200 | 300 |
 |
0 | 20 | 76 | 135 |
Рис. 1.5. График разгонной характеристики объекта без самовыравнивания. График разгонной характеристики объекта без самовыравнивания, построенной в соответствии с приведенной таблицей показан на рис. 1.5.
Для объекта без самовыравнивания коэффициент усиления определяется как отношение установившейся скорости изменения выходной величины к величине скачка входного сигнала. В нашем примере


Величина динамического запаздывания

Назад
| Содержание
| Дальше
Copyright (c) 2000 ATM